 лучшие Инженеры
лучшие Инженеры топ Закачек
топ Закачек топ Просмотров
топ Просмотров топ За месяц
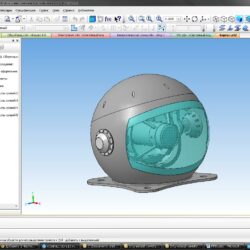
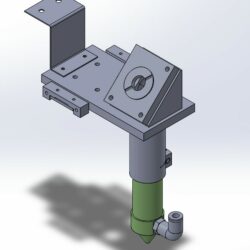
топ За месяцДвухосный гиростабилизатор координатора цели (головка самонаведения)
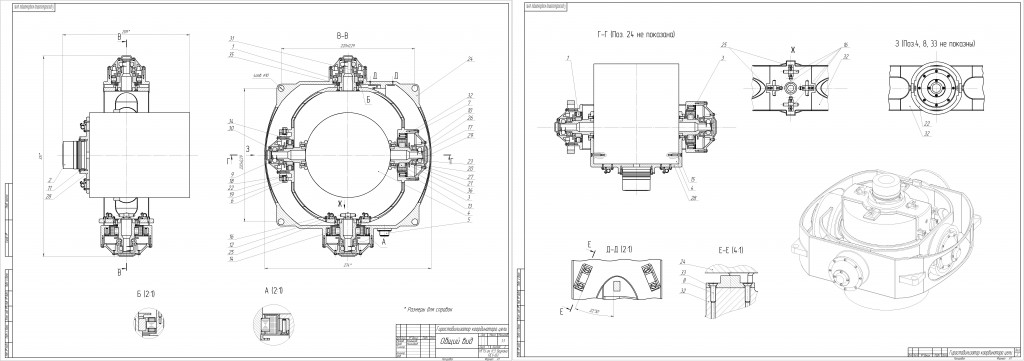
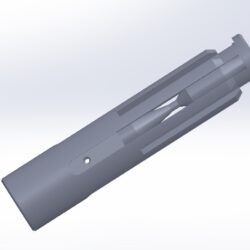
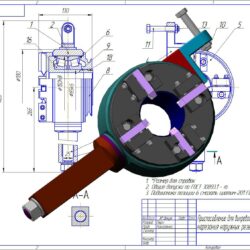
Курсовой проект по теории гироскопов и гиростабилизаторов (МГТУ им. Н.Э. Баумана, каф ИУ-2). Изделие представляет из себя карданов подвес на который соосно установлен пеленгатор (координатор цели, показан в виде масса габаритного макета) и трёхстепенный безкарданный гироскоп (БГТУ). На двух осях чувствительности расположены Датчики углов и датчики моментов. Техническое задание, подробное описание прибора, кинематическая и электрическая схемы прилагаются. Так же прилагается расчёт на прочность (файлы для SolidWorks Simulation (COSMOS) не прилагаются) наиболее нагруженной детали в соответствии с ТЗ.
Состав: Общий вид со спецификацией всего изделия, кинематическая схема, электрическая схема, расчётно пояснительная записка, расчёт возмущающих моментов, расчёт на устойчивость гиростабилизатора
Софт: Компас 3D 12, doc
Сайт: www